
Cara kerja sensor IMU menjadi hal penting dalam alat survey pemetaan berbasis GNSS. Teknologi ini membantu meningkatkan akurasi data, terutama saat kondisi lapangan tidak ideal. Dalam praktik survey, gangguan sinyal sering terjadi. IMU hadir untuk menjaga data tetap stabil dan presisi.
Cara Kerja Sensor IMU
Cara kerja sensor IMU berfokus pada pengukuran gerakan dan orientasi secara real-time. Sensor ini tidak bergantung pada sinyal satelit.
IMU terdiri dari tiga komponen utama:
- Accelerometer mengukur percepatan linear pada sumbu X, Y, dan Z.
- Gyroscope mengukur kecepatan rotasi.
- Magnetometer menentukan arah terhadap medan magnet bumi.
Cara kerja sensor IMU dimulai saat alat aktif:
- Accelerometer mendeteksi perubahan kecepatan.
- Gyroscope mencatat pergerakan rotasi.
- Magnetometer memberikan referensi arah.
- Data dikirim ke prosesor untuk diolah.
- Sistem menghasilkan informasi orientasi dan posisi relatif.
Data ini terus diperbarui dalam hitungan milidetik sehingga sangat responsif.
Integrasi IMU dengan GNSS
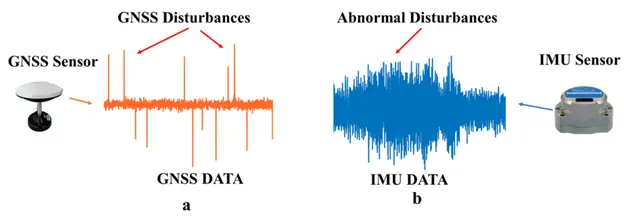
Cara kerja sensor IMU semakin optimal saat digabung dengan GNSS. GNSS memberikan posisi global, sedangkan IMU memberikan data gerakan.
Proses integrasi:
- GNSS memberikan koordinat absolut.
- IMU mengisi data saat sinyal GNSS terganggu.
- Sistem menggabungkan data menggunakan algoritma Kalman Filter.
- Hasilnya lebih stabil dan minim error.
Contoh lapangan: Survey di area gedung tinggi sering mengalami multipath. IMU membantu menjaga akurasi posisi saat sinyal tidak stabil.
Peran IMU dalam Survey Pemetaan
Cara kerja sensor IMU sangat penting dalam kegiatan survey modern.
Fungsi utama:
- Mempercepat proses pengukuran titik.
- Mengurangi kebutuhan leveling manual.
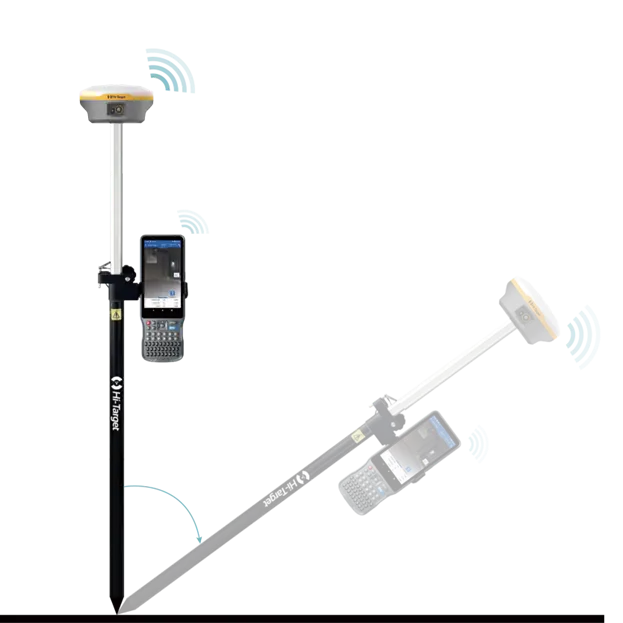
- Menjaga akurasi saat alat miring.
- Meningkatkan efisiensi kerja di lapangan.
Pada alat GNSS modern, fitur tilt correction menggunakan IMU memungkinkan pengukuran tetap akurat meski pole tidak tegak lurus.
Cara kerja sensor IMU berperan penting dalam alat survey pemetaan GNSS. Sensor ini mengukur gerakan dan orientasi secara real-time, lalu dikombinasikan dengan GNSS untuk menghasilkan data yang akurat dan stabil.
Penggunaan IMU membuat proses survey lebih cepat, efisien, dan tetap presisi dalam berbagai kondisi lapangan.
Referensi
- Groves, P. D. (2013). Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. Artech House.
- Kaplan, E. D., & Hegarty, C. (2017). Understanding GPS/GNSS: Principles and Applications. Artech House.
- Farrell, J. (2008). Aided Navigation: GPS with High Rate Sensors. McGraw-Hill.
- Titterton, D., & Weston, J. (2004). Strapdown Inertial Navigation Technology. IET.
- Noureldin, A., Karamat, T. B., & Georgy, J. (2013). Fundamentals of Inertial Navigation, Satellite-based Positioning and their Integration. Springer.
- El-Sheimy, N., & Youssef, A. (2020). Inertial Sensors Technologies for Navigation Applications: State of the Art and Future Trends. Satellite Navigation Journal.








